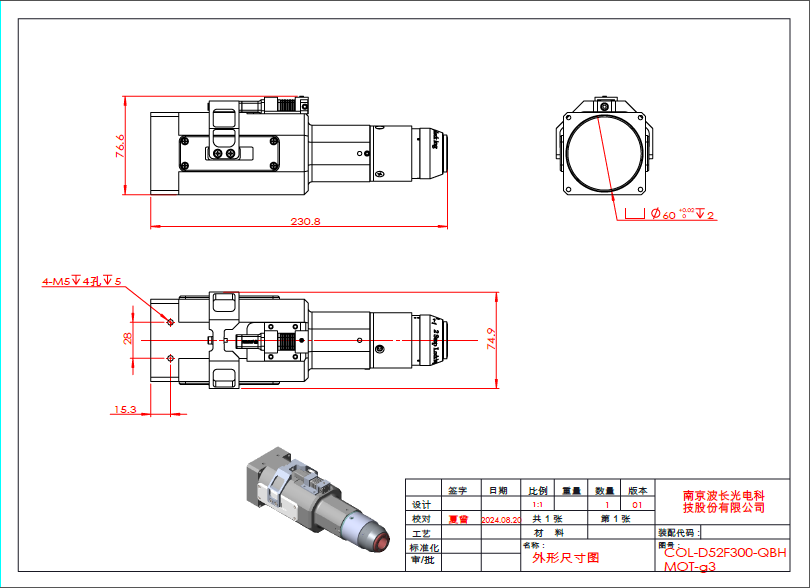
電動式電子コリメータ COL-D52F300-QBH-MOT






電動式電子コリメータ COL-D52F300-QBH-MOT
電動式電子コリメータ
レーザーコリメータの動作原理は、発散する光線を1枚または複数の正焦点レンズを通して収束させ、光軸に平行にすることです。例えば、ファイバーレーザーの先端から放射される光線が小さく、数度ほど発散している場合、コリメータを用いることで、直径は大きくなるものの発散角が非常に小さい光線に集束させることができます。





D52-F300モーターソフトウェア操作マニュアル
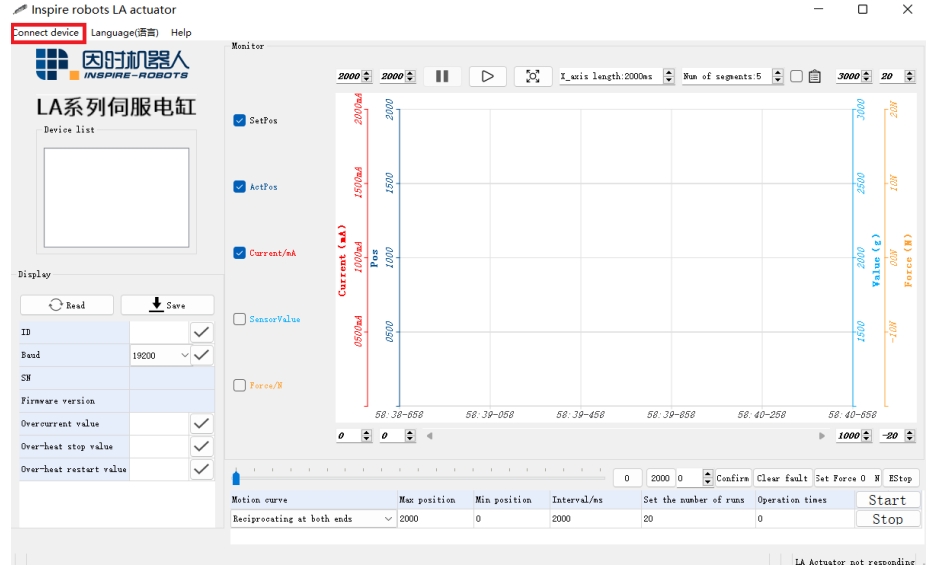
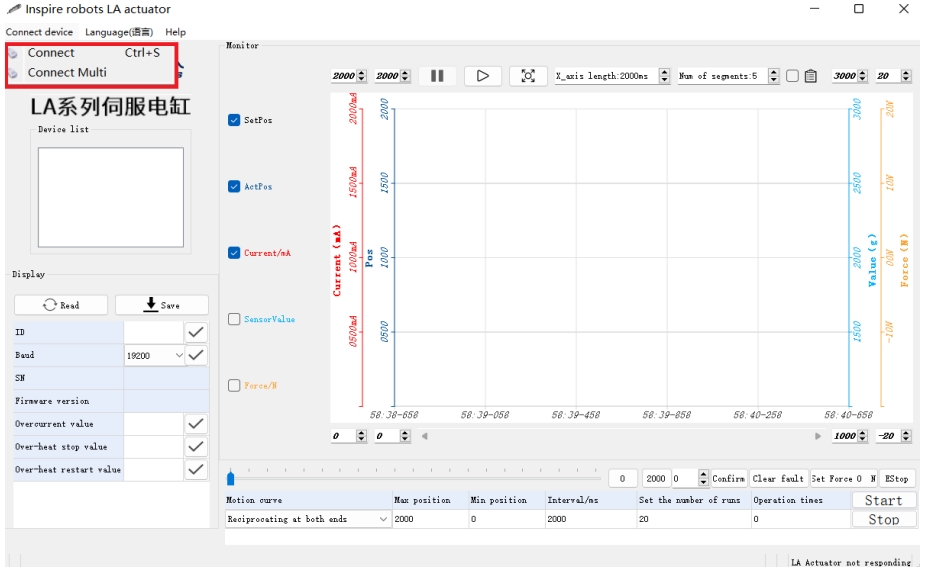
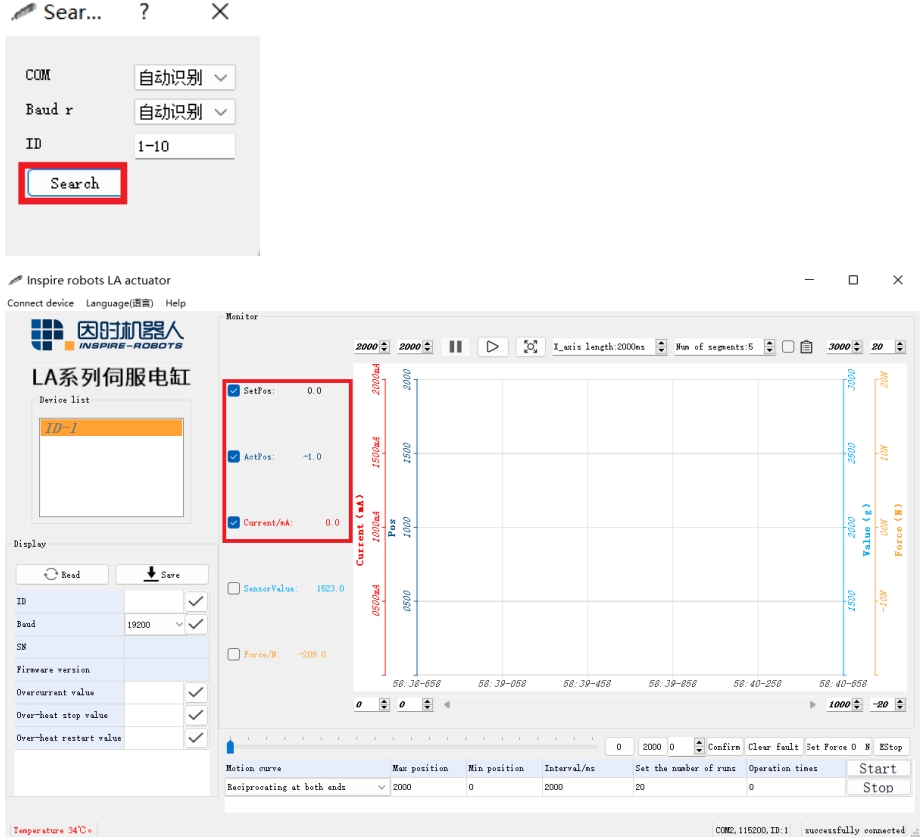
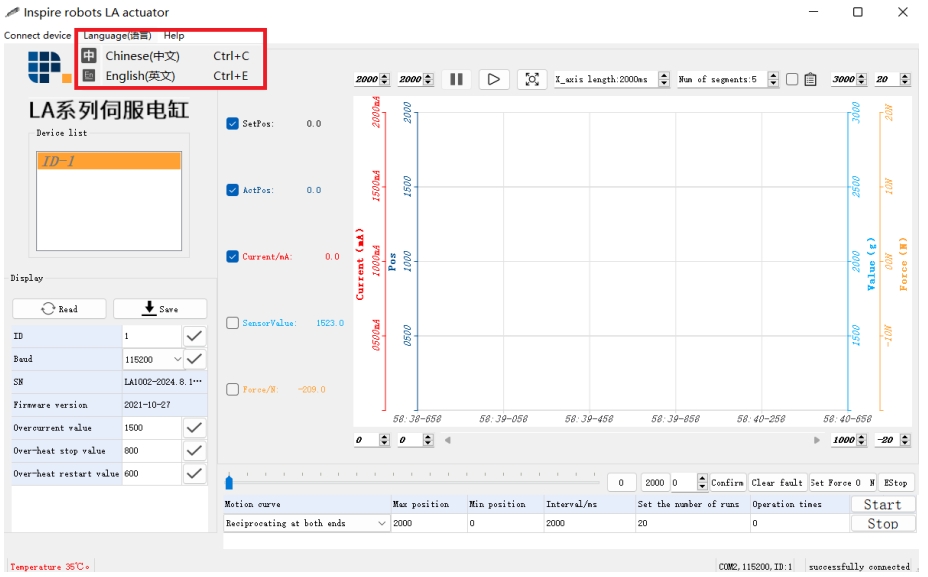
1.接続されたデバイス:
メニューの「デバイスを検索」→シリアルポート、ボーレート、ID範囲、またはデフォルトの自動設定を選択→検索をクリックします。アクチュエータが正常に検索されると、データ曲線ウィンドウとメインウィンドウ下部のステータスバーにデータが更新されます。
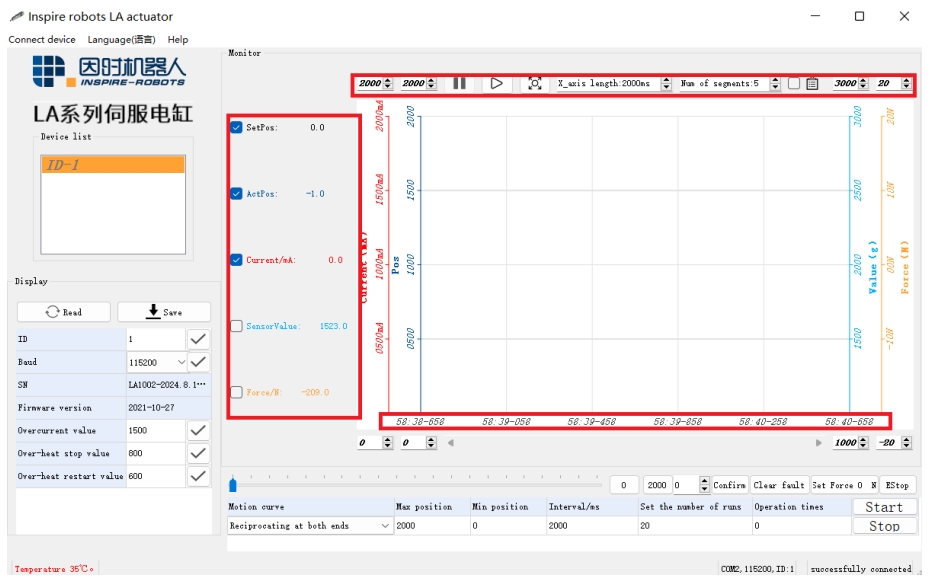
2. ステータス情報の監視:
アクチュエータを接続すると、データグラフにはアクチュエータの位置、電流、許容値(LAF、LASFシステム)などのリアルタイムの状態情報が表示されます。下部のステータスバーには、アクチュエータの温度、故障、接続状態などの情報が表示されます。
グラフ上に上位5件のデータを数値で表示し、曲線を表示するかどうかを選択するチェックボックス。
グラフの上には、リアルタイム曲線の表示範囲を一時停止、再開、クリア、復元するための 4 つのボタンがあります。ドラッグ: 右マウスボタンを押したままにして、グラフ内の曲線をドラッグします。
ズーム:マウスの左ボタンを押し続けて、グラフ内で拡大表示する領域を選択します。「座標軸範囲を復元」ボタンをクリックすると、表示範囲が通常に戻ります。
データ軸範囲設定:各データ軸のデータ範囲は、データ軸の上下にあるテキストボックスで設定できます。
時間軸のドラッグ:データ曲線が一時停止したとき、タイムラインの下にあるスライダーをドラッグしてタイムラインをドラッグできます。
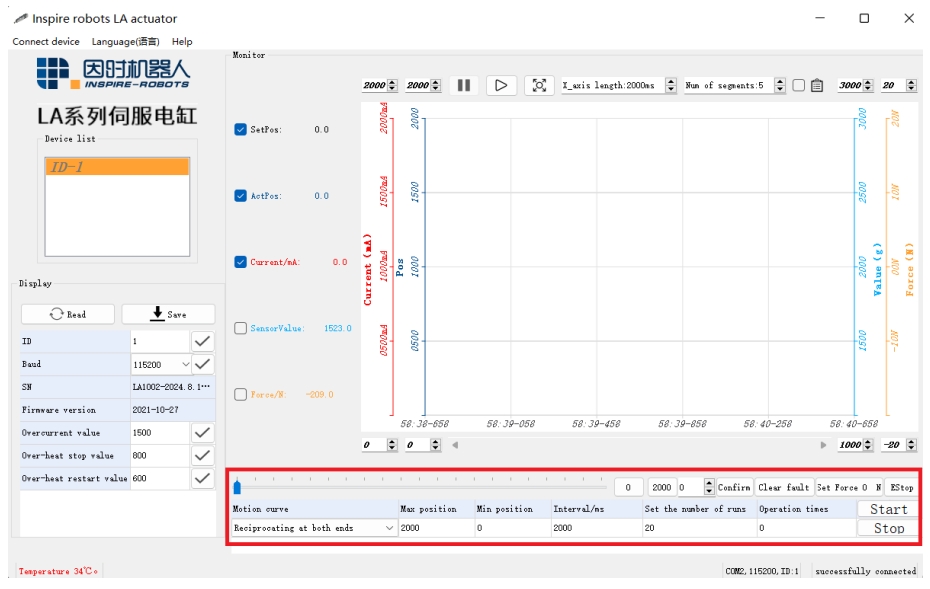
3.動作制御:
3.1 スライダーをドラッグするか、スライダーの右側にあるテキストボックスを設定することで、駆動プッシュロッドの位置を制御できます。
3.2 位置スライダーの下にある表を使用して、アクチュエータの周期的な往復運動を設定できます。
3.2.1 往復運動形式を選択し、対応するパラメータを設定すると、駆動タイプは最速で往復運動を実行します。
3.2.2 三角波または正弦波を選択し、対応するパラメータを設定すると、駆動タイプは設定された波形に従って動きます。
3.3 位置スライダーの右側にある 2 つのボタンは、アクチュエータに故障のクリアと緊急停止コマンドを送信できます。
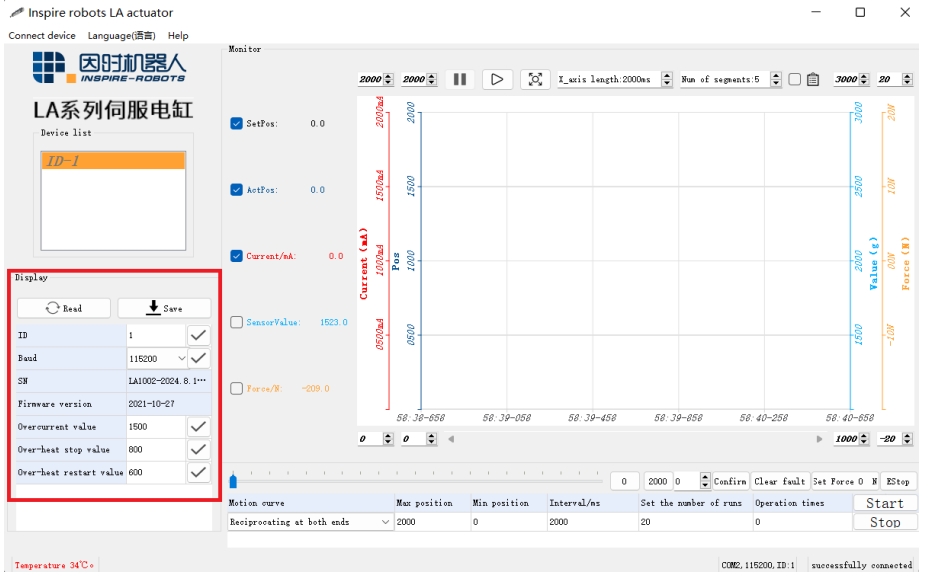
4. パラメータ設定
4.1 「パラメータの読み取り」をクリックすると、ソフトウェアはドライブの内部パラメータを表形式で表示します。
4.2 アクチュエータID、範囲1~254。
4.2 シリアルポートのボーレート。保存後に有効になります。
4.3 過電流保護値、範囲は300~500mA。
4.4 過熱保護値、範囲は200~800。
4.5 温度復帰開始値は200~600の範囲ですが、過熱保護値は温度復帰開始値より50高くなければならないことに注意してください。そうでない場合、パラメータは無効になります。
4.6 パラメータの変更は必ず保存してください。保存しないと、電源を切って再起動した後に動作しなくなります。
5. 中国語と英語の切り替え
メニューの「言語」→「中国語」または「英語」を選択してください。
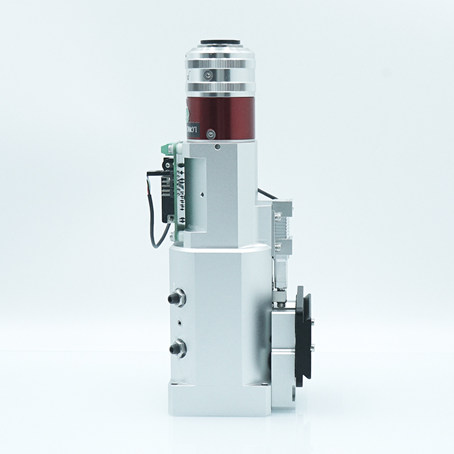
この電子コリメータは光ファイバーレーザーのコリメートが可能で、長距離でも効果的に動作します。手持ち式で、屋外での操作に便利です。高精度の電子ヘッドにより、ターゲットに素早く照準を合わせることができます。同時に、このコリメータは主に障害物除去に使用され、出力2000W以下、NA値0.065以下のレーザーに適しています。レーザー波長帯は約1064nmです。
電動式電子コリメータ
この電子コリメータは光ファイバーレーザーをコリメートでき、長距離でも効果的に動作します。ハンドヘルドタイプで、屋外での操作に便利です。高精度の電子ヘッドで、ターゲットに素早く照準を合わせます。同時に、このコリメータは主に障害物除去に使用され、レーザー出力が2000W以下、NA値が0.065以下のレーザーに適しています。レーザー波長帯は約1064nmです。




製品カテゴリー
Wavelength社は20年間、高精度光学製品の提供に注力してきました。
